-
_ROS1_node_communicationROS/ROS1 2023. 10. 4. 16:58
ROS는 노드들이 통신을하며 데이터를 주고 받는다.
이번에는 teacher.py와 student.py를 만들어서 데이터를 주고 받는 예제를 한번 해보도록하자.
1. 패키지 만들기
$ cd catkin_ws/src # 작업 디렉토리로 이동 $ catkin_create_pkg msg_send std_msgs rospy # 패키지 이름 설정 및 종속 패키지 추가 $ cd msg_send # msg_send 폴더로 이동 & mkdir launch # launch 폴더 생성launc 폴더까지 생성을 했으면 catkin_ws로 이동하여 catkin_make를 진행한다.
이후 teacher.py와 student.py를 생성한다.
# msg_send로 이동 $ roscd msg_send $ cd srcteacher.py
#!/usr/bin/env python import rospy from std_msgs.msg import String rospy.init_node('teacher') pub = rospy.Publisher('my_topic', String) rate = rospy.Rate(2) while not rospy.is_shutdown(): pub.publish('call me please') rate.sleep()student.py
#!/usr/bin/env python import rospy from std_msgs.msg import String def callback(msg): print msg.data rospy.init_node('student') sub = rospy.Subscriber('my_topic', String, callback) rospy.spin()주의!!: Python으로 만든 코드들은 항상 chmod +x로 실행권한을 줘야한다.
이제 src폴더에서 launch폴더로 이동하여 msg_send.launch를 만들어보자.
$ cd .. # 현재 위치인 src의 상위 폴더로 이동 $ cd launchmsg_send.launch
<launch> <node pkg="msg_send" type="teacher.py" name="teacher"/> <node pkg="msg_send" type="student.py" name="student" output="screen"/> </launch>이제 명령어를 입력하여 msg_send.launch를 실행해보자.
$ roslaunch msg_send msg_send.launch
다음과 같이 call me please라고 나오는 것을 볼 수 있다.
2. 여러가지 방법의 통신
ROS는 다음과 같은 통신을 할 수 있다.

1:1 통신 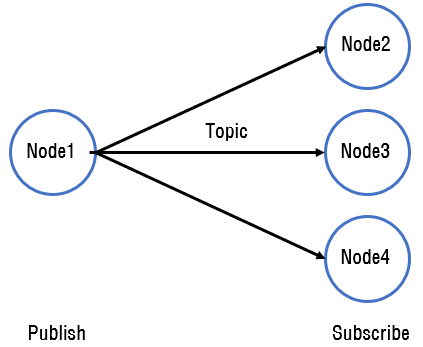
1:N 통신 
N:N 통신 이번에는 이 통신들이 잘 작동하는지 확인을 해볼 것이다.
이번에는 값으로 count를 해볼 것이므로 int32 타입의 변수를 사용할 것이다.
msg_send 패키지의 src 폴더에 teacher_int.py와 student_int.py를 만들자.
teacher_int.py
#!/usr/bin/env python import rospy from std_msgs.msg import Int32 rospy.init_node('teacher') pub = rospy.Publisher('my_topic', Int32) rate = rospy.Rate(2) count = 1 while not rospy.is_shutdown(): pub.publish(count) count = count + 1 rate.sleep()student_int.py
#!/usr/bin/env python import rospy from std_msgs.msg import Int32 def callback(msg): print msg.data rospy.init_node('student') sub = rospy.Subscriber('my_topic', Int32, callback) rospy.spin()실행할 launch 파일도 다음과 같이 작성해준다.
1_N.launch
<launch> <node pkg="msg_send" type="teacher_int.py" name="teacher1"/> <node pkg="msg_send" type="student_int.py" name="student1" output="screen"/> <node pkg="msg_send" type="student_int.py" name="student2" output="screen"/> <node pkg="msg_send" type="student_int.py" name="student3" output="screen"/> </launch>결과:

N_1.launch
<launch> <node pkg="msg_send" type="teacher_int.py" name="teacher1"/> <node pkg="msg_send" type="teacher_int.py" name="teacher2"/> <node pkg="msg_send" type="teacher_int.py" name="teacher3"/> <node pkg="msg_send" type="student_int.py" name="student1" output="screen"/> </launch>결과:

N_N.launch
<launch> <node pkg="msg_send" type="teacher_int.py" name="teacher1"/> <node pkg="msg_send" type="teacher_int.py" name="teacher2"/> <node pkg="msg_send" type="teacher_int.py" name="teacher3"/> <node pkg="msg_send" type="student_int.py" name="student1" output="screen"/> <node pkg="msg_send" type="student_int.py" name="student2" output="screen"/> <node pkg="msg_send" type="student_int.py" name="student3" output="screen"/> </launch>결과:
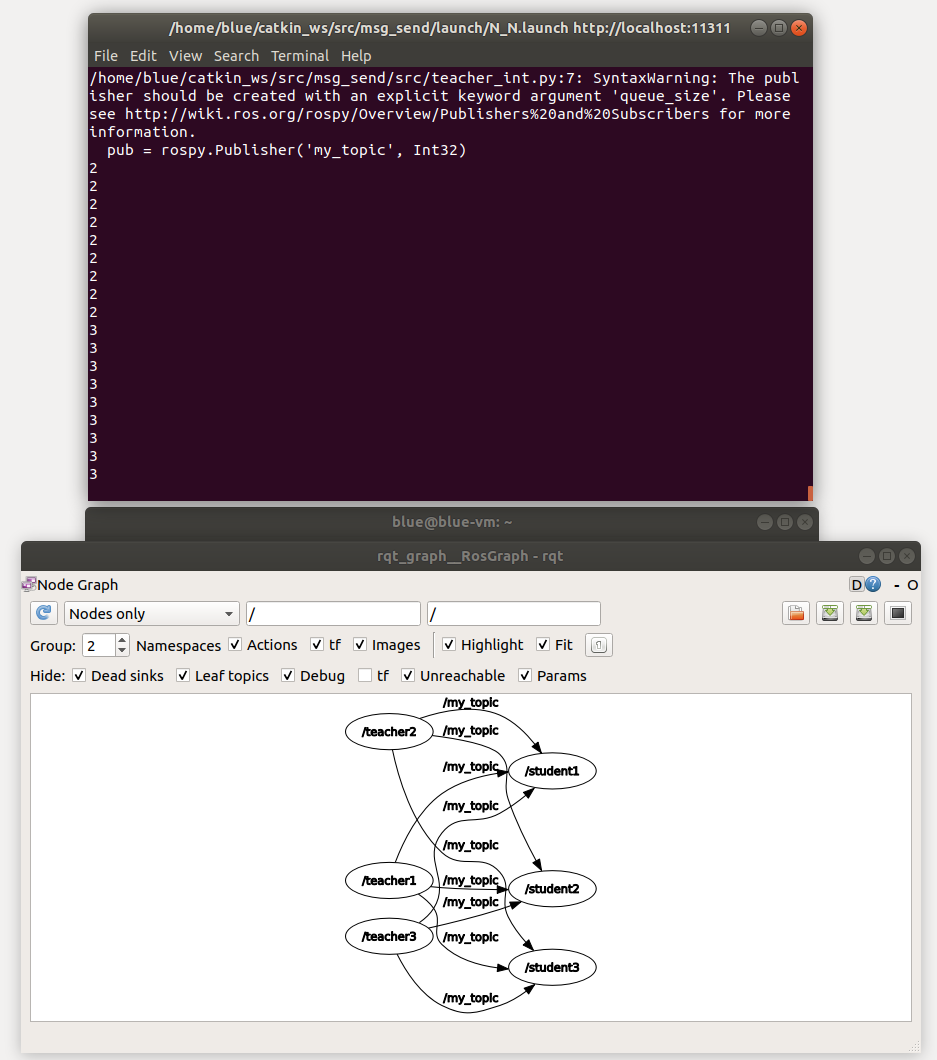
모두 값 1이 누락됨을 볼 수 있다.
'ROS > ROS1' 카테고리의 다른 글
_ROS1_노드 실습(1) (0) 2023.10.17 _ROS1_custom_msg (0) 2023.10.04 _ROS1_roslaunch (0) 2023.10.03 _ROS1_package_pub&sub (0) 2023.10.02 _ROS1_설치_환경설정_기본실습 (0) 2023.10.01