-
_ROS1_rvizROS/ROS1 2023. 10. 23. 23:02
rviz는 ROS의 시각화 툴로 토픽들을 시각화 할 수 있는 도구이다.
이번에는 URDF(Unified Robot Description Format)제공 파일을 가지고 rviz에서 토픽들을 시각화 해보려고 한다.
주어진 rviz_xycar 패키지 내부의 urdf를 rviz에서 구현하고 joint states gui로 구동을 확인해보려고 한다.
우선적으로 joint states publisher패키지를 다음 명령어로 설치할 수 있다.
$ sudo apt install ros-melodic-joint-state-publisher $ roslaunch rviz_xycar xycar_3d.launch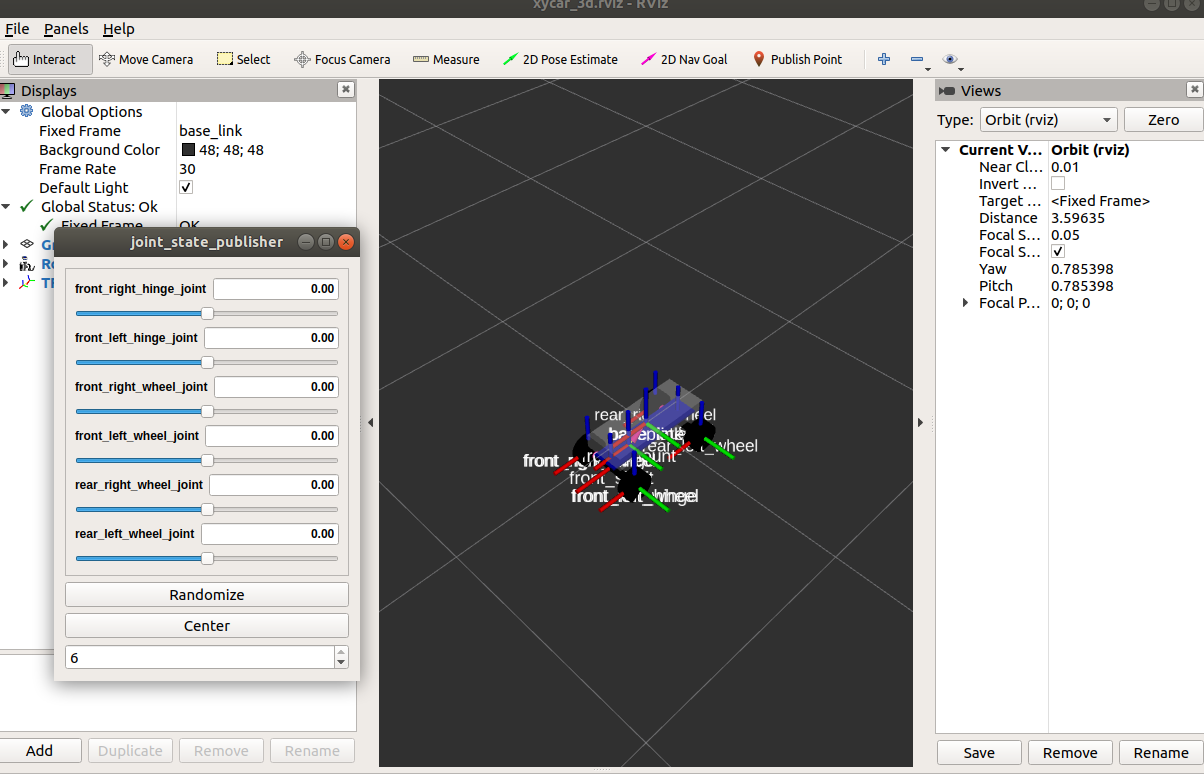
설치 및 실행후 joint_state_publisher로 rviz 상의 자동차를 제어할 수 있다.
이번에는 move_joint.launch를 실행해보면 앞바퀴가 조금씩 회전하는 모습을 볼 수 있다.

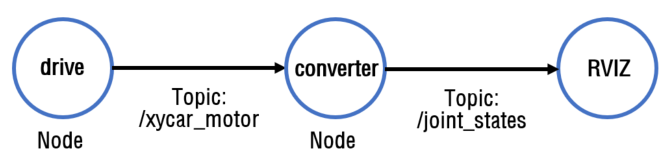
이번에는 바퀴에 토픽을 보내서 8자 주행을 해보려고 한다.
이번에는 새롭게 converter.py와 rviz_8_drive.py를 작성하여 문제를 해결하고자 한다.
Python
- rviz_8_drive.py
#!/usr/bin/env python import rospy import time from xycar_motor.msg import xycar_motor motor_control = xycar_motor() rospy.init_node('driver') pub = rospy.Publisher('xycar_motor', xycar_motor, queue_size=1) def motor_pub(angle, speed): global pub, motor_control motor_control.angle = angle motor_control.speed = speed pub.publish(motor_control) speed = 3 while not rospy.is_shutdown(): angle = -50 for _ in range(80): motor_pub(angle, speed) time.sleep(0.1) angle = 0 for _ in range(80): motor_pub(angle, speed) time.sleep(0.1) angle = 50 for _ in range(80): motor_pub(angle, speed) time.sleep(0.1) angle = 0 for _ in range(80): motor_pub(angle, speed) time.sleep(0.1)- converter.py
#!/usr/bin/env python import rospy, rospkg import math from xycar_motor.msg import xycar_motor from sensor_msgs.msg import JointState from std_msgs.msg import Header global pub, msg_joint_states, l_wheel, r_wheel def callback(data): global pub, msg_joint_states, l_wheel, r_wheel msg_joint_states.header.stamp = rospy.Time.now() Angle = data.angle steering = math.radians(Angle * 0.4) if l_wheel > 3.14: l_wheel = -3.14 r_wheel = -3.14 else: l_wheel += 0.01 r_wheel += 0.01 msg_joint_states.position = [steering, steering, r_wheel, l_wheel, r_wheel, l_wheel] pub.publish(msg_joint_states) rospy.init_node('converter') pub = rospy.Publisher('joint_states', JointState, queue_size=1) msg_joint_states = JointState() msg_joint_states.header = Header() msg_joint_states.name = ['front_right_hinge_joint', 'front_left_hinge_joint', 'front_right_wheel_joint', 'front_left_wheel_joint', 'rear_right_wheel_joint','rear_left_wheel_joint'] msg_joint_states.velocity = [] msg_joint_states.effort = [] l_wheel = -3.14 r_wheel = -3.14 rospy.Subscriber("xycar_motor", xycar_motor, callback) rospy.spin()- rviz_drive.launch
<launch> <param name="robot_description" textfile="$(find rviz_xycar)/urdf/xycar_3d.urdf"/> <param name="use_gui" value="false"/> <!-- rviz display --> <node name="rviz_visualizer" pkg="rviz" type="rviz" required="true" args="-d $(find rviz_xycar)/rviz/rviz_drive.rviz"/> <node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher"/> <node name="driver" pkg="rviz_xycar" type="rviz_8_drive.py" /> <node name="converter" pkg="rviz_xycar" type="converter.py" /> </launch>결과

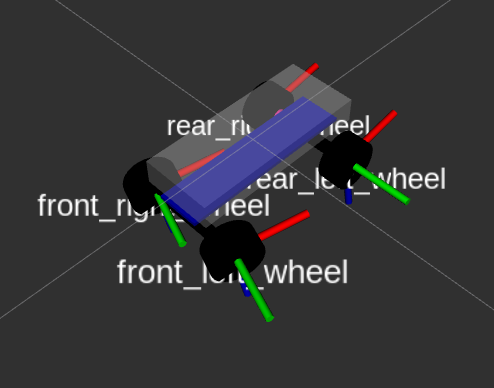
바퀴가 좌우로 회전하며 움직이는 것을 볼 수 있다.
Odometry
Odometry는 바퀴가 달린 차량, 로봇이 주행하며 이동한 거리를 측정할 수 있는 센서이다.
해당 센서는 원의 둘레의 길이인 원주와 바퀴의 회전수로 이동 거리를 계산한다.
하지만, 자동차의 경우 앞 바퀴에서 회전시 꺾이는 각도, 그리고 이동 거리도 다르기 때문에 Ackermann Steering에 대해 공부를 해보면 좋을 것 같다.
https://en.wikipedia.org/wiki/Ackermann_steering_geometry
Ackermann steering geometry - Wikipedia
From Wikipedia, the free encyclopedia Arrangement of steering linkages Ackermann geometry The Ackermann steering geometry is a geometric arrangement of linkages in the steering of a car or other vehicle designed to solve the problem of wheels on the inside
en.wikipedia.org
해당 페이지에서는 rviz에서 Odometry가 어떻게 사용되는지만 볼 것이다.
odom topic 발행 예제코드는 아래의 링크에서 제공하고 있으므로 처음이라면 한번 해보는 것을 추천한다.
https://gist.github.com/atotto/f2754f75bedb6ea56e3e0264ec405dcf
Publishing Odometry Information over ROS (python)
Publishing Odometry Information over ROS (python). GitHub Gist: instantly share code, notes, and snippets.
gist.github.com
이 예제를 바탕으로 Odometry가 어떻게 동작하는지 볼 것이다.
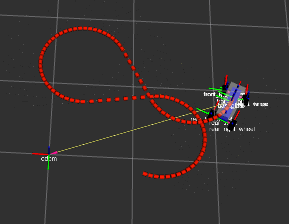
제공된 실행파일을 실행하면 Odom을 기준으로 막대가 회전하는 것을 볼 수 있다.

rviz에서 실행된 시뮬레이션 모습 
rqt_graph rviz에서 8자 주행
지금까지 사용한 토픽들로 rviz상에서 8자 주행을 해보자.
이전에 만든 converter.py는 그대로 사용하며, 추가로 odom_8_drive.py와 rviz_odom.py를 추가하여 코드를 작성할 것이다.
odom_8_drive.py도 기존의 rviz_8_drive.py의 코드를 가져와서 사용해도 된다.
- rviz_odom.py
#!/usr/bin/env python import math from math import sin, cos, pi import rospy import tf from nav_msgs.msg import Odometry from geometry_msgs.msg import Point, Pose, Quaternion, Twist, Vector3 from sensor_msgs.msg import JointState global Angle def callback(msg): global Angle Angle = msg.position[msg.name.index("front_left_hinge_joint")] rospy.Subscriber('joint_states', JointState, callback) rospy.init_node('odom_pub') odom_pub = rospy.Publisher("odom", Odometry, queue_size=50) odom_broadcaster = tf.TransformBroadcaster() cur_time = rospy.Time.now() last_time = rospy.Time.now() r = rospy.Rate(30.0) cur_speed = 0.4 wheel_base = 0.2 x_ = 0 y_ = 0 yaw_ = 0 Angle = 0 while not rospy.is_shutdown(): cur_time = rospy.Time.now() dt = (cur_time - last_time).to_sec() cur_steering_angle = Angle cur_angular_velocity = cur_speed * math.tan(cur_steering_angle) / wheel_base x_dot = cur_speed * cos(yaw_) y_dot = cur_speed * sin(yaw_) x_ += x_dot * dt y_ += y_dot * dt yaw_ += cur_angular_velocity * dt odom_quat = tf.transformations.quaternion_from_euler(0, 0, yaw_) odom_broadcaster.sendTransform( (x_, y_, 0.), odom_quat, cur_time, "base_link", "odom" ) odom = Odometry() odom.header.stamp = cur_time odom.header.frame_id = "odom" odom.pose.pose = Pose(Point(x_, y_, 0.), Quaternion(*odom_quat)) odom.child_frame_id = "base_link" odom.twist.twist = Twist(Vector3(x_, y_, 0), Vector3(0, 0, yaw_)) odom_pub.publish(odom) last_time = cur_time r.sleep()- rviz_odom.launch
<launch> <param name="robot_description" textfile="$(find rviz_xycar)/urdf/xycar_3d.urdf"/> <param name="use_gui" value="false"/> <!-- rviz display --> <node name="rviz_visualizer" pkg="rviz" type="rviz" required="true" args="-d $(find rviz_xycar)/rviz/rviz_odom.rviz"/> <node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher"/> <node name="driver" pkg="rviz_xycar" type="odom_8_drive.py" /> <node name="odometry" pkg="rviz_xycar" type="rviz_odom.py" /> <node name="converter" pkg="rviz_xycar" type="converter.py" /> </launch>결과
'ROS > ROS1' 카테고리의 다른 글
_ROS1_Lidar (0) 2023.10.24 _ROS1_sensors & IMU (0) 2023.10.24 _ROS1_노드 실습(2) (1) 2023.10.17 _ROS1_노드 실습(1) (0) 2023.10.17 _ROS1_custom_msg (0) 2023.10.04