-
_ROS1_ultrasonicROS/ROS1 2023. 10. 27. 22:40
이번에는 초음파 센서 ROS 패키지를 만들어보려고 한다.
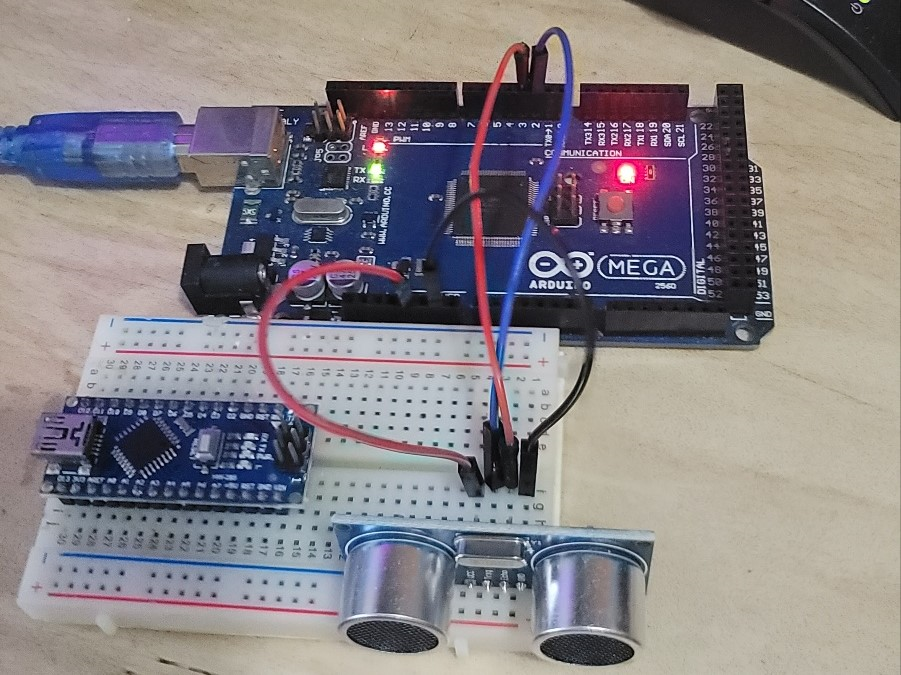
필요한 것은 Linux computer, Arduino, HC-SR04 초음파센서이다.
소리의 속도는 초속 340m로 1cm 이동에 약 29us 소요가 된다면 다음과 같은 수식을 얻을 수 있다.
$$ x=\frac{t(us) \div 2}{29(us)}(cm) $$
x: 물체까지의 거리
t: 송신과 수신의 시간차
이제 아두이노와 초음파 센서를 연결하고 아두이노 IDE에 프로그램을 작성했다.
초음파 센서와의 연결은 다음과 같다. (D는 Digital pin을 의미한다.)
- Vcc: 5v pin
- Trig: D2 pin
- Echo: D3 pin
- Gnd: GND pin
소스코드는 다음과 같다.
Arduino
//핀 지정 #define trig 2 #define echo 3 void setup() { Serial.begin(9600); // 9600bps 통신속도로 시리얼 통신 시작 pinMode(trig, OUTPUT); // trig pin을 출력으로 선언 pinMode(echo, INPUT); // echo pin을 입력으로 선언 } void loop() { long duration, distance; // 거리 측정 변수 선언 digitalWrite(trig, LOW); // Trig pin Low delayMicroseconds(2); // 2us delay digitalWrite(trig, HIGH);// Trig pin High delayMicroseconds(10); // 10us delay digitalWrite(trig, LOW); // Trig pin Low duration = pulseIn(echo, HIGH); // pulseIn()은 핀에서 펄스 신호를 읽어서 마이크로초 단위로 반환 distance = duration * 170 / 1000; Serial.print("dis(mm): "); Serial.print(distance); Serial.print("\n"); delay(100); }아두이노에 업로드를 하고 시리얼 모니터를 확인하면 다음의 결과를 볼 수 있다.
이제 초음파센서 데이터를 ROS토픽에 담아서 Publish를 하도록 해보자.
ultra_pub.py, ultra_sub.py를 만들어서 이를 확인해볼 것이다.
아두이노에서 데이터를 받아와야 하기 때문에 Serial 통신을 할 것이다.
Python
- ultra_pub.py
#!/usr/bin/env python import serial, time, rospy, re from std_msgs.msg import Int32 ser_front = serial.Serial( port='/dev/ttyACM0', baudrate=9600, ) def read_sensor(): serial_data = ser_front.readline() ser_front.flushInput() ser_front.flushOutput() ultrasonic_data = int(filter(str.isdigit, serial_data)) msg.data = ultrasonic_data if __name__ == '__main__': rospy.init_node('ultrasonic_pub', anonymous=False) # initialize node pub = rospy.Publisher('ultrasonic', Int32, queue_size=1) msg = Int32() # message type while not rospy.is_shutdown(): read_sensor() pub.publish(msg) # publish a message time.sleep(0.2) ser_front.close()- ultra_sub.py
#!/usr/bin/env python import rospy from std_msgs.msg import Int32 def callback(msg): print(msg.data) rospy.init_node('ultrasonic_sub') sub = rospy.Subscriber('ultrasonic', Int32, callback) rospy.spin()- ultra.launch
<launch> <node pkg="ultrasonic" type="ultrasonic_pub.py" name="ultrasonic_pub"/> <node pkg="ultrasonic" type="ultrasonic_sub.py" name="ultrasonic_sub" output="screen"/> </launch>일단 위의 launch파일을 실행하기 위해서 연결된 usb에 권한을 줘야 한다.
$ sudo chmod 666 /dev/ttyACM0실행하면 다음의 결과를 볼 수 있다.


'ROS > ROS1' 카테고리의 다른 글
_ROS1_Lidar (0) 2023.10.24 _ROS1_sensors & IMU (0) 2023.10.24 _ROS1_rviz (1) 2023.10.23 _ROS1_노드 실습(2) (1) 2023.10.17 _ROS1_노드 실습(1) (0) 2023.10.17