-
ROS2 Topic 기초 사용법ROS/ROS2 2025. 1. 8. 19:50
ROS2 version: Jazzy 1. Topic?
ROS2에서 Topic은 가장 기본이 되는 단방향 데이터 송수신 방법으로, Publisher가 데이터 전송, Subscriber가 데이터 수신을 하게 된다.
기본적으로 1:1 통신을 하지만 상황에 따라 1:N, N:1, N:N 통신도 가능하다.

Topic 1:1 통신 
Topic 1:N 통신 Topic은 주로 센서데이터를 받아오거나 모터에 명령을 보낼때 사용한다.
2. Topic 실습
이전처럼 Turtlesim과 Teleopkey를 실행해보자.
Terminal 1
ros2 run turtlesim turtlesim_nodeTerminal 2
ros2 run turtlesim turtle_teleop_keyTerminal 3
rqt_graphrqt_graph를 통해 다음의 node graph를 볼 수 있다.
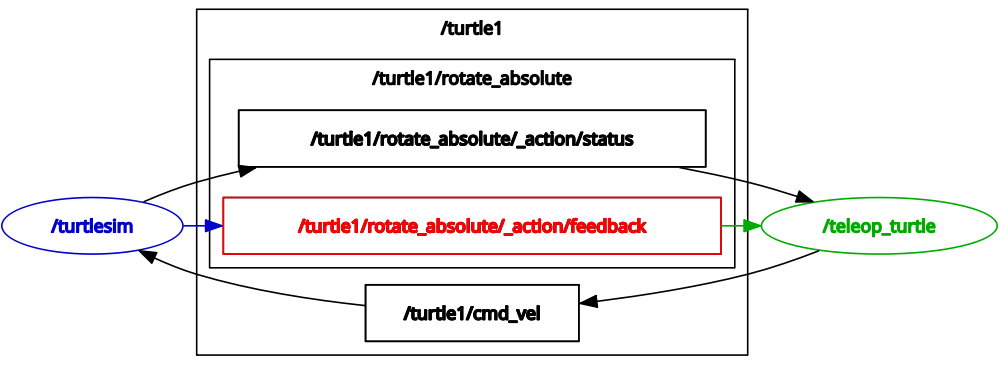
rqt_graph /teleop_turtle node로 부터 /turtle1/cmd_vel Topic을 Publisher 했고, /turtlesim node가 이를 Subscriber 하는 것을 볼 수 있다.
2.1 list
ros2 topic list # topic list를 출력. ros2 topic list -t # topic list와 메시지 타입 출력.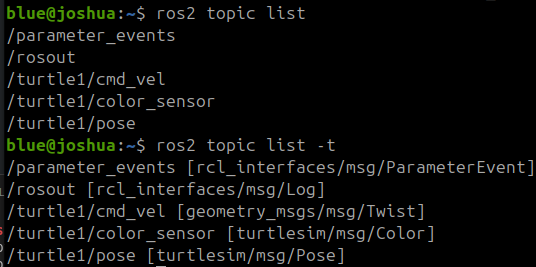
topic list 2.2 echo
ros2 topic echo <topic_name>topic이 발행하는 데이터를 볼 수 있다.
2.3 info
ros2 topic info <topic_name>topic이 발행하는 데이터의 정보를 볼 수 있다.

topic info 위의 정보를 통해서 발행된 msg의 type은 geometry_msgs/msg/Twist.
해당 Topic을 게시하는 노드가 하나, 해당 Topic을 구독하는 노드가 하나 있다는 뜻.
2.4 interface show
ros2 interface show geometry_msgs/msg/Twist위의 info 명령어로 얻은 msg type의 interface를 볼 수 있다.

interface show 2.5 pub
ros2 topic pub <topic_name> <msg_type> '<args>'Topic으로 명령을 Publisher 할 수 있다.
'<args>'는 interface show로 확인한 interface.
# 연속적으로 pub ros2 topic pub /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.8}}" # 1번 실행 ros2 topic pub -1 /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.8}}" # 하나의 메시지를 publisher 후 종료 ros2 topic pub --once -w 1 /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.8}}"마지막 메시지의 경우 옵션은 다음과 같다.
- --once: 메시지를 한번반 publisher
- -w 2: 구독자의 수가 2개인 경우. (현재 /turtlesim, ros2 topic echo로 Subscription의 수는 2개이다.)

topic info로 확인한 Subscription의 수 
rqt_graph로 확인한 /turtle1/cmd_vel의 Subscription 즉, 구독자의 수가 2개 이상인 경우 한 번만 실행하라는 뜻이다.
이번에는 pose를 echo 명령어로 확인해보자.
ros2 topic echo /turtle1/pose
/turtle1/pose 확인 1. /pose topic으로 메시지 게시
ros2 topic pub /pose geometry_msgs/msg/PoseStamped '{header: "auto", pose: {position: {x: 1.0, y: 2.0, z: 3.0}}}'결과:

2. /reference topic으로 메시지 게시
결과:

2.6 hz
ros2 topic hz /turtle1/posehz명령어로 데이터가 publish되는 속도(Hz)를 확인할 수 있다.
결과:

hz 확인 평균 62hz 정도가 나오며 약 0.016초에 한번씩 토픽을 발행하고 있다.
2.7 bw
ros2 topic bw /turtle1/poseTopic이 사용하는 대역폭(bandwidth)을 확인할 수 있다.
결과:

bw 확인 결과를 보면 평균 1.50 KB/s의 대역폭으로 /turtle1/pose 토픽이 사용되는 것을 확인할 수 있다.
2.8 find
ros2 topic find <topic_type>특정 메시지 타입을 어떤 topic이 이용하는지 보려면 위의 명령어를 사용하면 된다.
ros2 topic find geometry_msgs/msg/Twist결과:

2.9 delay
topic은 RMW(Robot MiddleWare) 및 네트워크 장비를 거치기 때문에 지연(latency)시간이 반드시 존재한다.
사용하는 msg에 header[6]라는 stamp msg를 사용하고 있다면 다음의 명령어를 이용하여 지연 시간을 확인할 수 있다.
ros2 topic delay <topic_name>지연 시간 = |발행한 시간 - 구독한 시간|
ref:
Understanding topics — ROS 2 Documentation: Jazzy documentation
© Copyright 2025, Open Robotics.
docs.ros.org
'ROS > ROS2' 카테고리의 다른 글
ROS2 Action 기초 사용법 (0) 2025.02.04 ROS2 Service 기초 사용법 (0) 2025.01.13 ROS2 Node 기초 사용법 (0) 2025.01.07 ROS2 유용한 명령어 (0) 2025.01.07 ROS2 DDS (Data Distribution Service) (0) 2025.01.06