-
데브코스 자율주행_TIL_23.10.03데브코스 자율주행 Perception/_TIL(Today I Learned) 2023. 10. 3. 23:16
ROS 노드 통신 문제 해결 2
1. 타임 슬롯
노드가 데이터를 주고받을 때 Rate와 sleep으로 주기를 조절하며 그림으로 보면 다음과 같다.
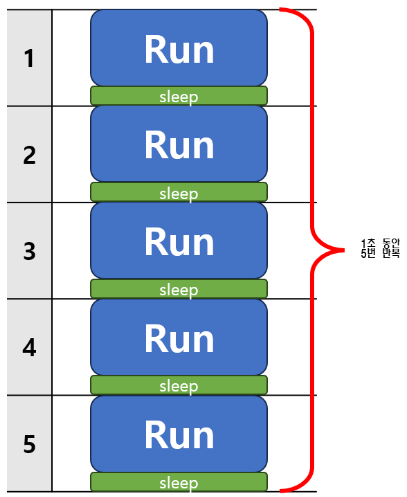
실제로 데이터를 주기적으로 발송하다가 양이 많아지면, 타임슬롯을 오버하면 시간을 오버하여 데이터가 보내지는 것을 볼 수 있다.
Rate와 sleep을 잘 조절해서 타임슬롯이 오버되지 않고 데이터를 주고받을 수 있게 해야한다.
2. 노드의 순차 실행
노드는 서로 협업해야 하므로, 순차적으로 노드를 실행해야할 필요가 있다.
이는 receiver node가 각 노드의 순서대로 데이터를 받게 하면 된다.
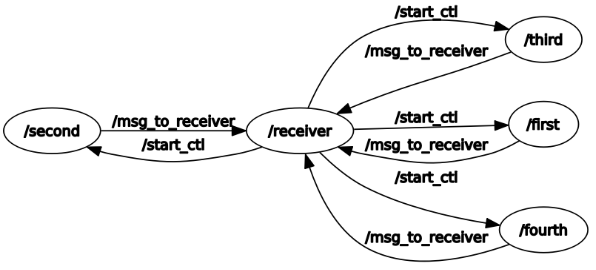
first부터 순차적으로 receiver노드가 데이터를 받는 rqt_graph 3. 받은 토픽 가공
각 노드는 모듈화 되어있기 때문에 받은 토픽을 가공하여 다른 곳으로 보낼 수 있다.
이는 ROS의 장점이며, ROS가 로봇 개발에 사용되는 이유이다.
https://mokchanic.tistory.com/66
_ROS1_노드 실습(2)
1. 타임 슬롯 만약 데이터를 주기적으로 발송하다가 타임슬롯을 오버하면 어떻게 될까?? 주로 rospy.Rate()와 rospy.sleep()으로 이 주기를 조절하는데 이를 그림으로 표현하면 다음과 같이 볼 수 있다.
mokchanic.tistory.com
'TIL > _TIL(Today I Learned)' 카테고리의 다른 글
데브코스 자율주행_TIL_23.10.05 (0) 2023.10.05 데브코스 자율주행_TIL_23.10.04 (0) 2023.10.04 데브코스 자율주행_TIL_23.10.02 (0) 2023.10.02 데브코스 자율주행_TIL_23.09.26 (0) 2023.09.26 데브코스 자율주행_TIL_23.09.25 (0) 2023.09.26