-
데브코스 자율주행_TIL_23.10.09데브코스 자율주행 Perception/_TIL(Today I Learned) 2023. 10. 27. 22:47
오늘 배운 내용
1. rviz
- Lidar
2. Arduino & Ultrasonic
- Ultrasonic
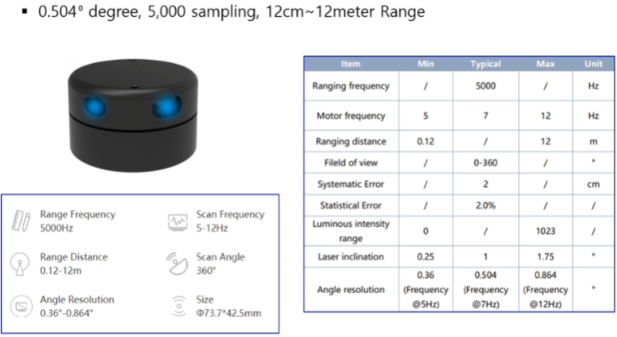
1. rviz_Lidar sensor
Lidar 센서는 laser를 쏴서 주변에 어떤 장애물들이 있는지 감지하는 센서이다.
xycar에서 제공하는 센서의 스펙은 다음과 같다.
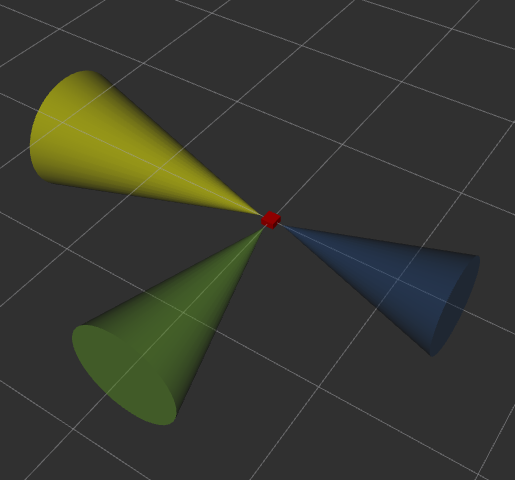
주어진 rosbag 파일을 활용하여 Lidar 뷰어 프로그램 실습을 하였으며, rviz상에서 감지되는 lidar 값을 원뿔 형태로 시각화 하였다.
2. rviz_Ultrasonic sensor
xycar의 Ultrasonic
센서는 아두이노 MEGA board와 의 HC-SR04센서로 실험을 하였으며 구성은 다음과 같다.
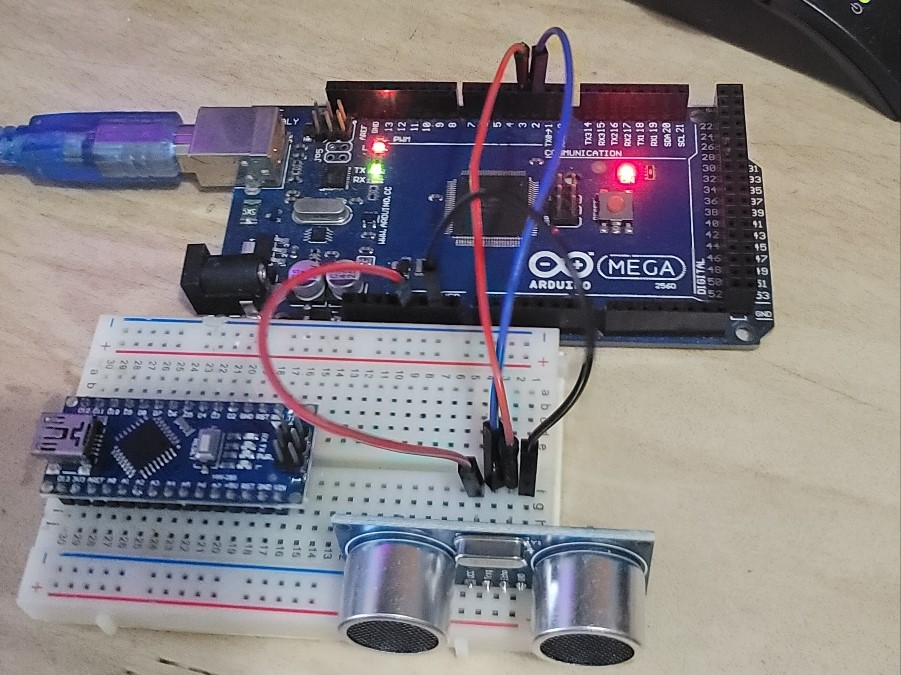
센서 데이터를 받는 프로그램은 Arduino IDE로 작성하였고, ROS에서 usb port를 지정하여 sensor data를 ROS로 받아올 수 있게 하였다.
https://mokchanic.tistory.com/71
_ROS1_ultrasonic
이번에는 초음파 센서 ROS 패키지를 만들어보려고 한다. 필요한 것은 Linux computer, Arduino, HC-SR04 초음파센서이다. 소리의 속도는 초속 340m로 1cm 이동에 약 29us 소요가 된다면 다음과 같은 수식을 얻
mokchanic.tistory.com
그동안, 아두이노에서 데이터를 어떻게 받아오는지 궁금했는데 아두이노와 연결된 usb port를 프로그램상에서 설정하여 데이터를 받아올 수 있음을 확인하였다.
추가적인 방법들을 더 찾아보고 배운 방법보다 효율적인지 한번 실험을 해보는것도 나쁘지 않을것 같다.
'TIL > _TIL(Today I Learned)' 카테고리의 다른 글
데브코스 자율주행_TIL_23.10.11 ~ 13 (0) 2023.10.27 데브코스 자율주행_TIL_23.10.10 (0) 2023.10.27 데브코스 자율주행_TIL_23.10.06 (0) 2023.10.06 데브코스 자율주행_TIL_23.10.05 (0) 2023.10.05 데브코스 자율주행_TIL_23.10.04 (0) 2023.10.04